फीडर में उच्च स्वचालन, चपटे, अच्छे खिला परिशुद्धता, प्रेस के उच्च तुल्यकालन प्रदर्शन, आसान संचालन, श्रम लागत और फर्श की जगह में बड़ी बचत आदि है। इसने अधिक से अधिक स्टैम्पिंग ग्राहकों का पक्ष जीता है। । मांग में वृद्धि के साथ, अधिक से अधिक निर्माता तीन-इन-वन फीडर के उत्पादन में लगे हुए हैं, लेकिन उनके साथ आने वाली गुणवत्ता को भी मिलाया गया है, विशेष रूप से डिजाइन और उत्पादन में। संकट।
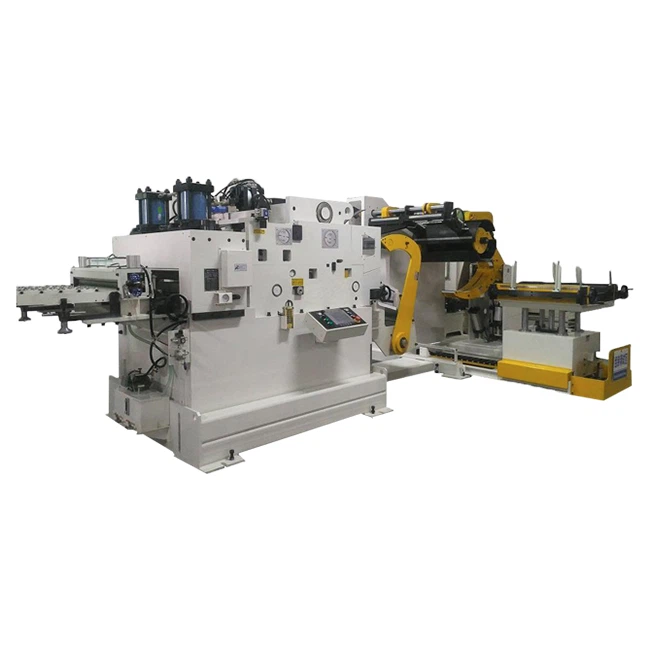
Decoiler staightener और फीडर में मुख्य रूप से दो प्रमुख कार्यात्मक घटक होते हैं: रैक भाग और लेवलिंग फीडिंग भाग, और डिज़ाइन में मुख्य समस्या लेवलिंग फीडिंग भाग में दिखाई देती है। तीन-इन-वन फीडर के चपटे फीडिंग हिस्से में फ्रंट फीडिंग तंत्र शामिल है। , एक मिडिल लेवलिंग मैकेनिज्म, एक रियर फीडिंग मैकेनिज्म और एक ड्राइविंग डिवाइस।
समस्या 1: फीडर ड्राइव डिवाइस में, फ़ीड रोलर को आम तौर पर सर्वो मोटर द्वारा नियंत्रित किया जाता है। क्योंकि इमदादी मोटर का आउटपुट टॉर्क खुद छोटा होता है और उपयोग की जरूरतों को पूरा नहीं कर पाता है, तो फीड रोलर और सर्वो मोटर के बीच एक निश्चित मंदी का प्रदर्शन किया जाना चाहिए। ताकि पल के बढ़े हुए उपयोग को प्राप्त किया जा सके। आमतौर पर, मंदी के लिए एक रिड्यूसर के उपयोग के अलावा, मूल रूप से दो-चरण सिंक्रोनस व्हील डेसेलेरेशन या एक-स्टेज सिंक्रोनस व्हील डेसेलेरेशन को अपनाया जाता है। वास्तविक निर्माण और उपयोग में, संरचनात्मक अंतरों के कारण, यदि दो-चरण सिंक्रोनस व्हील डेक्लेरेशन का उपयोग किया जाता है, तो इसे स्थापित करना असुविधाजनक है, और टाइमिंग बेल्ट के खराब होने के बाद टाइमिंग बेल्ट को बदलने के लिए अधिक परेशानी होती है। यदि पहले चरण के सिंक्रोनस व्हील का उपयोग मंदी के लिए किया जाता है, तो वास्तविक उपयोग में, बड़े मंदी के कारण, टाइमिंग बेल्ट के दांतों की संख्या छोटी होती है, जिसके परिणामस्वरूप संचरण होता है। दर कम हो गई है, प्रभाव बहुत संतोषजनक नहीं है।
समस्या 2: फीडिंग प्रक्रिया में, तीन-इन-वन फीडर की सटीकता आवश्यकताओं को पूरा करने के लिए, प्रत्येक बार फीडिंग त्रुटि को खत्म करने के लिए मोल्ड में पोजिशनिंग पिन सेट करना आवश्यक होता है। इसलिए, फीडिंग डिवाइस के लिए प्रत्येक फीडिंग पर एक आराम समारोह होना चाहिए। चरण पूरा हो जाने के बाद, प्रत्येक फ़ीड की संचयी त्रुटि को समाप्त करने के लिए प्रत्येक उत्पाद के स्थान को प्राप्त करने के लिए फ़ीड रोलर को आराम करने की आवश्यकता होती है। इसके वास्तविक उपयोग के दौरान, यह पाया जाता है कि वास्तविक विश्राम केवल तब प्राप्त किया जा सकता है जब विश्राम और विश्राम पूरा हो जाता है। पूर्व-विश्राम का उपयोग केवल घुमावदार प्रक्रिया के दौरान किया जा सकता है, और जब इसे आराम किया जाता है, अगर इसे पहले ले जाया जाता है जब मध्य और पीठ को आराम दिया जाता है, तो एकरूपता को पूरा करने के लिए छूट आंदोलन को नियंत्रित करना मुश्किल होता है, और सामने की ओर छूट रोलर केवल सामग्री की लोच के लिए सामग्री को दबाता है जब सामग्री की लोच बड़ी होती है या सामग्री मोटी होती है।
समस्या 3: इसके उपयोग के दौरान, विश्राम के लिए उपयोग किया जाने वाला शक्ति स्रोत हवा का दबाव है, और यह आमतौर पर छिद्रण मशीन के साथ संयोजन में उपयोग किया जाता है। यह अपरिहार्य है कि कंपन होगा, और कंपन के कारण 3 इन 1 फीडर की स्थिति अक्सर होगी। पेंच ढीला है और चपटे की खिला सटीकता को प्रभावित करता है। इसलिए, वर्तमान विधि सीधे साइड प्लेट पर काउंटरसंक छेद और पोजीशनिंग शाफ्ट और निश्चित साइड प्लेट के दोहन के बीच की दूरी को संसाधित करने के लिए है, या पोजिशनिंग अक्ष को जोड़ा नहीं गया है। त्रुटि को समाप्त करने के लिए स्थिति अक्ष को समायोजित करें।
काल्पनिक मशीनरी के डिजाइन और उत्पादन में, तीन प्रमुख समस्याओं को परिष्कृत और अनुकूलित किया गया है। पहले चरण के सिंक्रोनस व्हील डेक्लेरेशन और फर्स्ट-स्टेज गियर की कमी के प्रसारण को न केवल स्थापित करना और बनाए रखना आसान है, बल्कि ट्रांसमिशन दक्षता में सुधार करना भी फायदेमंद है; रोलर सिलेंडर को खिलाने से पहले मैनुअल वाल्व नियंत्रण के लिए स्वचालित वाल्व नियंत्रण से बदल दिया जाता है, जो उपयोगकर्ता को संचालित करने और लागत बचाने के लिए सुविधाजनक है; साइड प्लेट पोजिशनिंग एक्सिस को जोड़ा जाता है, पोजिशनिंग को प्रभावी ढंग से पोजिशन किया जा सकता है, और पोजिशनिंग एक्सिस को एरर के मामले में एडजस्ट किया जा सकता है। को खत्म करने।